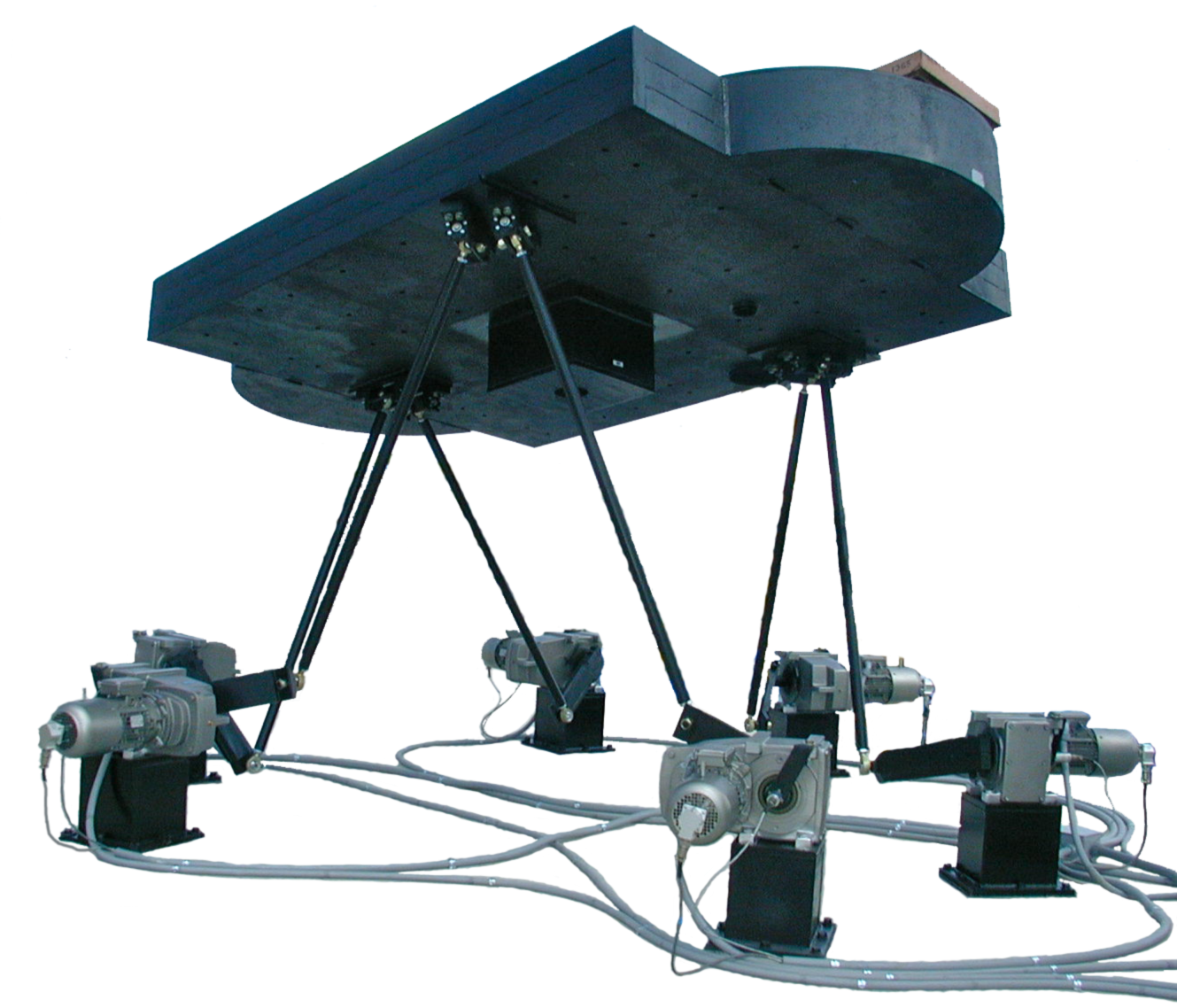
Motion Base Platforms – 2DOF, 3DOF, 6DOF, and 7DOF
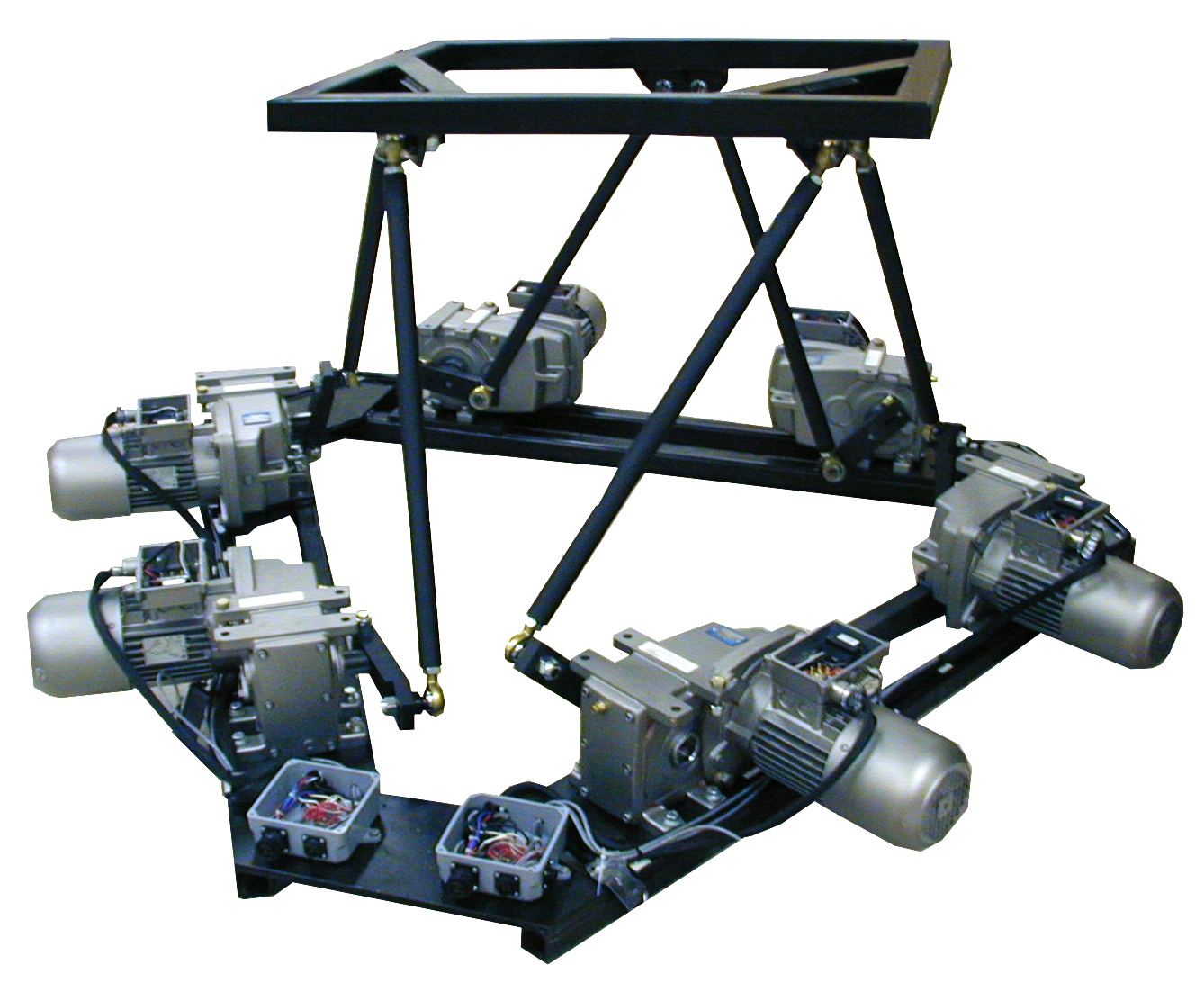
Servos & Simulation designs and manufactures a full range of motion base platform systems for military, commercial, and entertainment applications. These platforms are:
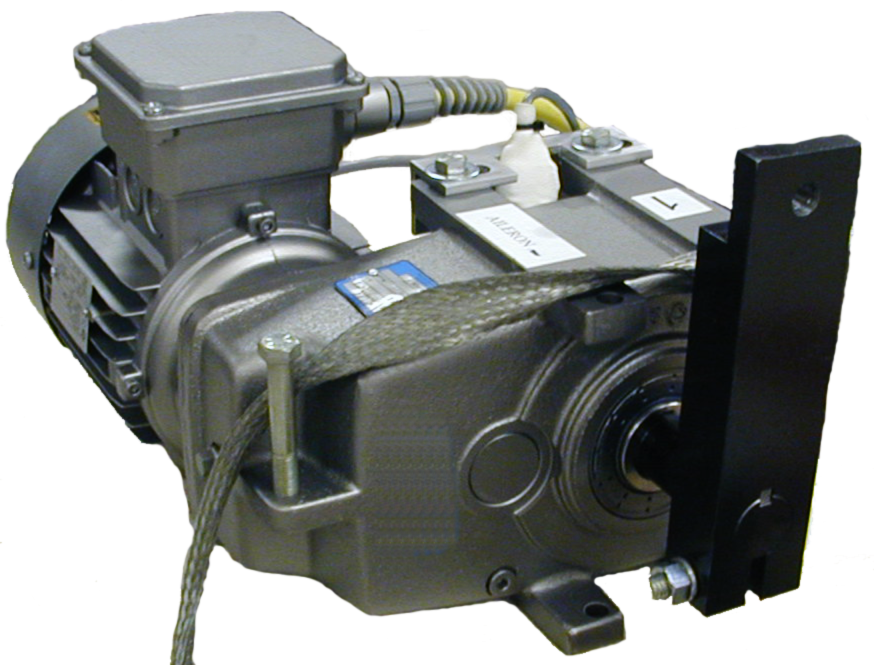
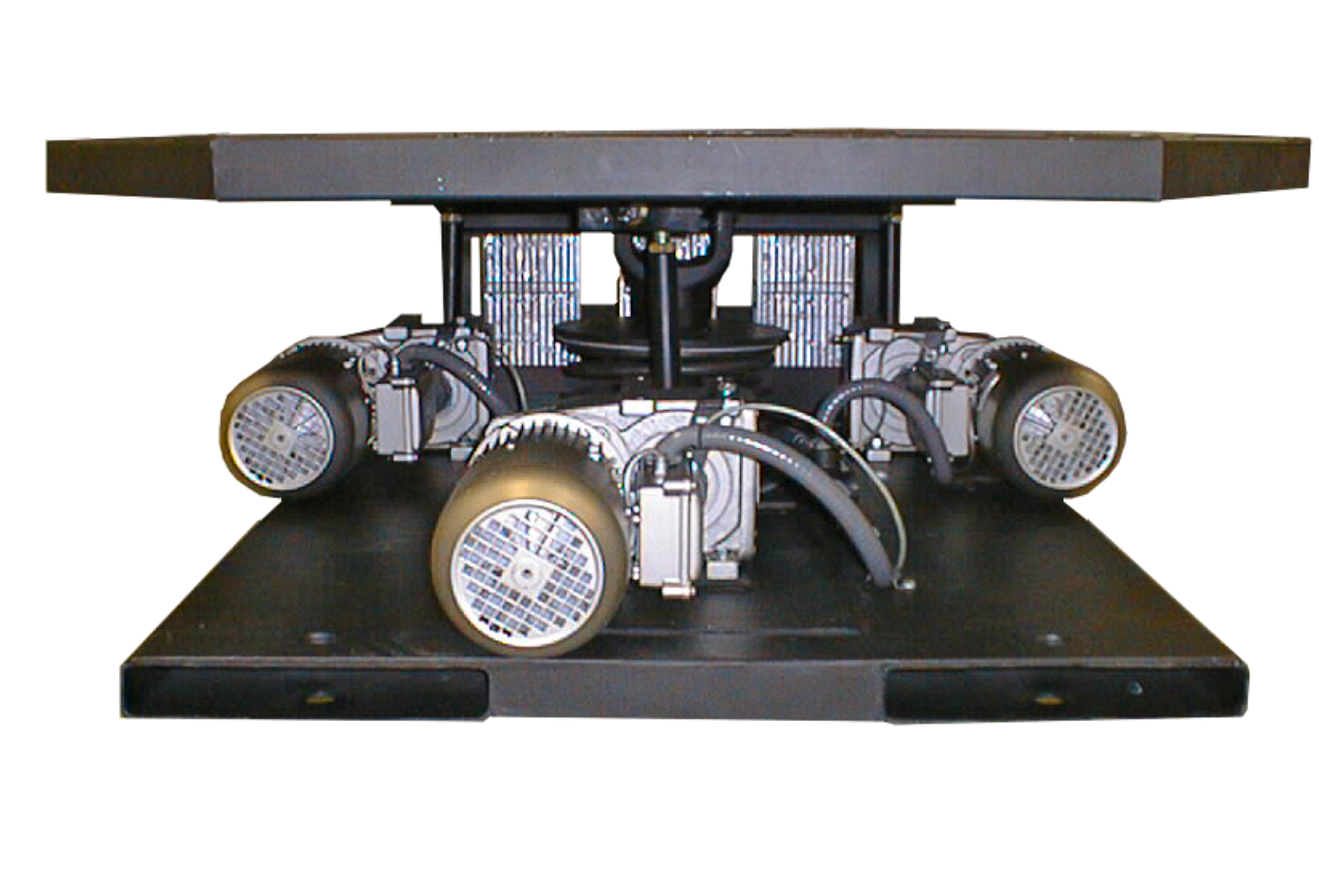
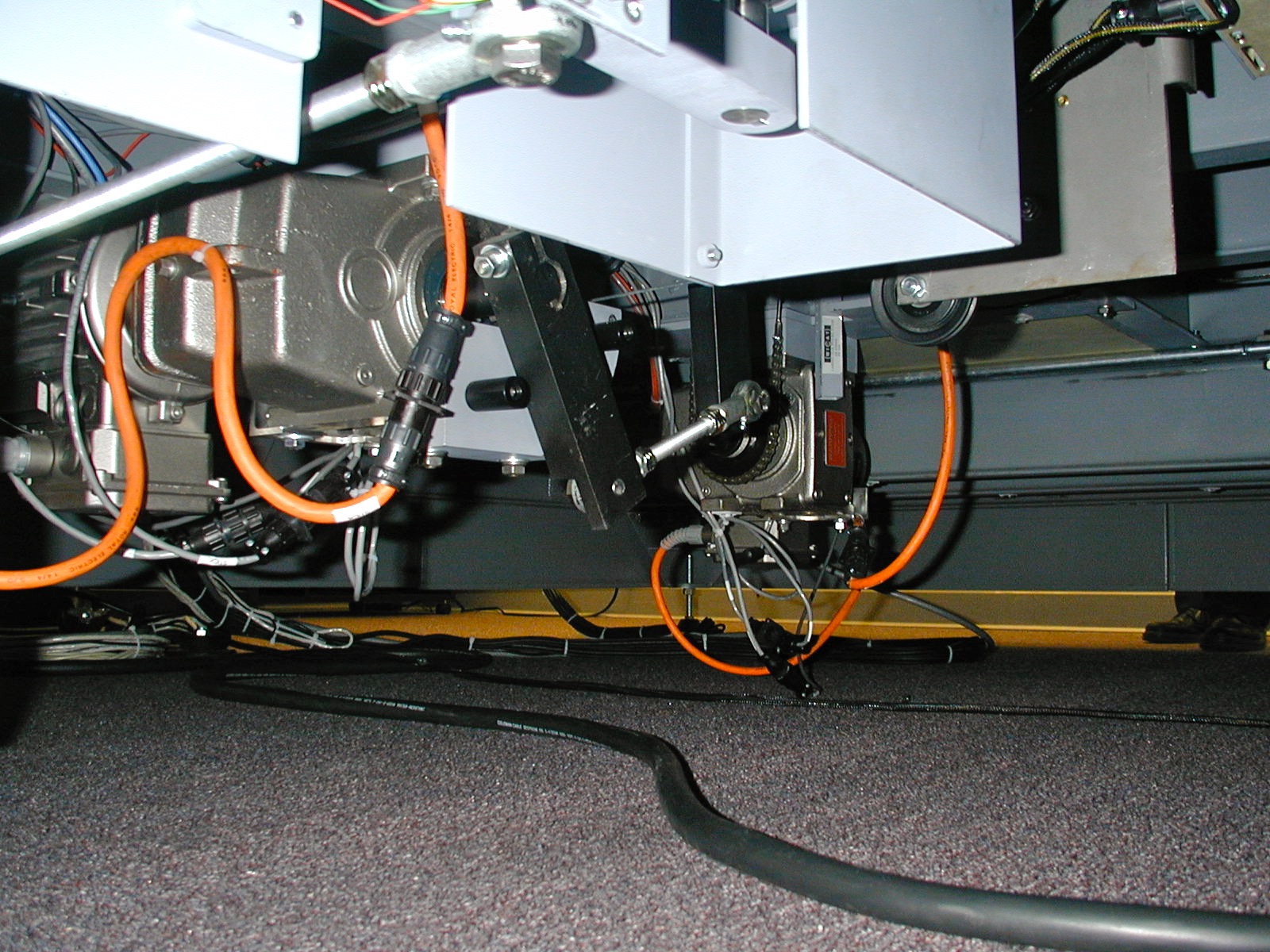
Fully Electric
Digitally Controlled
Virtually Maintenance-free
This ensures unparalleled performance, reliability, and environmental friendliness, making them ideal for immersive experiences and precision testing.
Versatile Applications
Our motion platforms deliver seamless and immersive motion feedback, making them perfect for:
Intense gaming rides
Realistic car simulators
Thrilling seat shakers
Captivating virtual reality entertainment
Bench testing of antennas and equipment
Platform Sizes & Use Cases
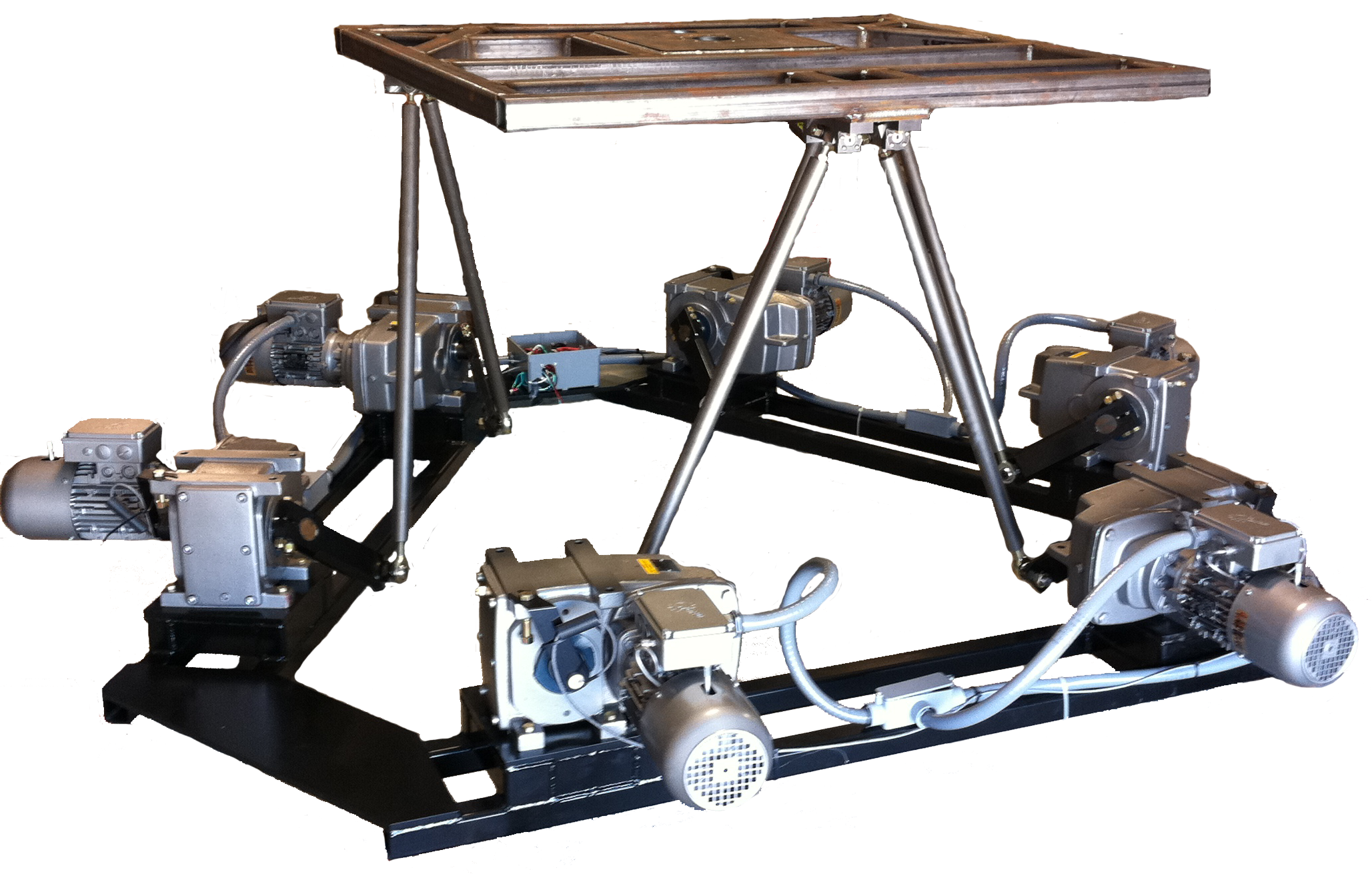
500 lbs and Under
Compact platforms designed for single or dual riders, ideal for:
Home-based car simulation
Seat shaker experiences
Small-scale VR setups
Equipment and antenna bench testing
1,000 lbs
Mid-size platforms that accommodate 1–4 people, perfect for:
Shared entertainment rides
Group VR experiences
Interactive training environments
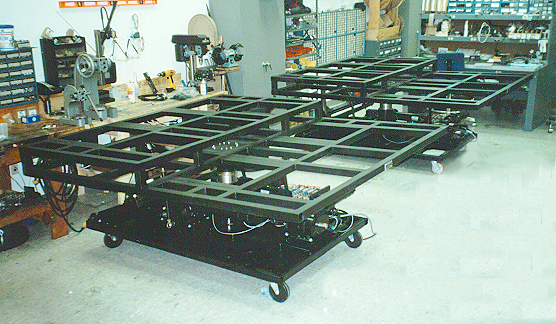
2,000 lbs and Larger
Large-scale platforms built for multi-seat configurations with walkways, suitable for:
Full-motion simulators
Panoramic VR adventures
Advanced testing environments (e.g., sea state, water tanks, aerodynamics)
Motion Range & Performance
Our systems start at ±15° for smaller platforms and scale up to ±35° or more for larger bases. High-angle systems have achieved up to ±50° in roll and pitch—learn more here.
All platforms feature precision servo systems, enabling use in demanding test scenarios and simulation environments.
Durability & Safety
Servos & Simulation motion base platforms are:
Environmentally friendly
Sealed for durability
Built to withstand harsh conditions
Each system is engineered for long-term reliability and safety, ensuring consistent performance across all applications.